We have come up with something very special for you: From now on, we will be sharing our FactoftheWeek on our LinkedIn page for you every week! These are exciting and useful facts from the field of intralogistics, especially for automated guided vehicles (AGVs), which will not only give you an interesting insight into our daily work, but can also expand your knowledge.
Why are we doing this? It’s simple: we don’t just want to keep our know-how to ourselves, we want to share it!
Follow us on LinkedIn (https://www.linkedin.com/company/continua-systems-gmbh) to never miss a FactoftheWeek! Look forward to interesting facts and let us expand your knowledge together.
#13 SQL
SQL (Structured Query Language) is a standardized programming language used to manage and manipulate data in relational databases. With SQL, users can create databases, retrieve, insert, update and delete data. SQL is widely used in the database world as it provides an efficient and flexible way to manage and analyze large amounts of data. It also enables the definition of relationships between different data tables and provides tools for analysis and reporting.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7239275186091417601/?actorCompanyId=91657960
#12 Hard(ware)-PLC vs. Soft(ware)-PLC
PLCs (programmable logic controllers) are an elementary component in automation technology. A distinction is made between classic hard PLCs and soft PLCs. A hard PLC is a special hardware component that has been developed for controlling industrial processes. It contains all the necessary components such as processor, memory, input/output modules and communication interfaces in a robust housing. A soft PLC is a software solution that runs on standard PC hardware or embedded systems. It emulates the functions of a classic hard PLC. The choice between hard PLC and soft PLC depends on the specific requirements of the application, such as the required reliability, flexibility, costs and environmental conditions.
LinkedIn:
#11 Localization
Localization describes procedures that provide the most accurate approximation possible of the position of AGVs. A distinction is made between relative and absolute localization. While relative localization solutions require a predefined starting point and approximate the subsequent positions using deltas in sensor data, absolute localization approaches are able to estimate the position of the AGV using external (global) references without knowing the starting point.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7234190423441723392
#10 Framework vs. Library
A framework is a template that describes the structure and sequence of a program; the developer writes his program using this template. A library abstracts complex functions or offers (standard) functions that the developer can simply integrate and use in their program as required.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7231646231091904512
#9 Encapsulation vs. Abstraction
Encapsulation is the concept of bundling data and methods that access that data into a single unit or class to restrict direct access to specific components of the object and protect the integrity of the data. Abstraction, on the other hand, refers to hiding the complex implementation details of a system and exposing only the essential features so that the user can interact with the system at a higher level without having to understand the underlying complexity.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7229116993231024128
#8 Navigation
Navigation describes the process by which an AGV follows the path specified to it. This path (often also trajectory) is either generated by the AGV itself or comes as a specification from a higher-level control system. Knowledge of the current position and a projection of future positions based on the motion model (kinematics) of the AGV play a decisive role here.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7226572772141891584
#7 Unit Test vs. Integration Test
Unit tests check individual components or software parts in isolation. Integration tests check the interaction of several components/software parts together.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7224005834446426112
#6 Centralized vs. decentralized AGV fleet management
AGVs with centralized control are coordinated by a central system that monitors and controls a fleet of AGVs and provides an interface for orders from higher-level enterprise resource planning systems (ERP). In addition, comprehensive user interfaces are often provided. AGVs with decentralized control work largely autonomously and communicate directly with each other to coordinate their orders. In this scenario, orders can be provided by higher-level AGV systems in various ways. As a rule, there is no central user interface for managing the AGV fleet.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7221528717108379648
#5 AGVs vs. conveyor technology
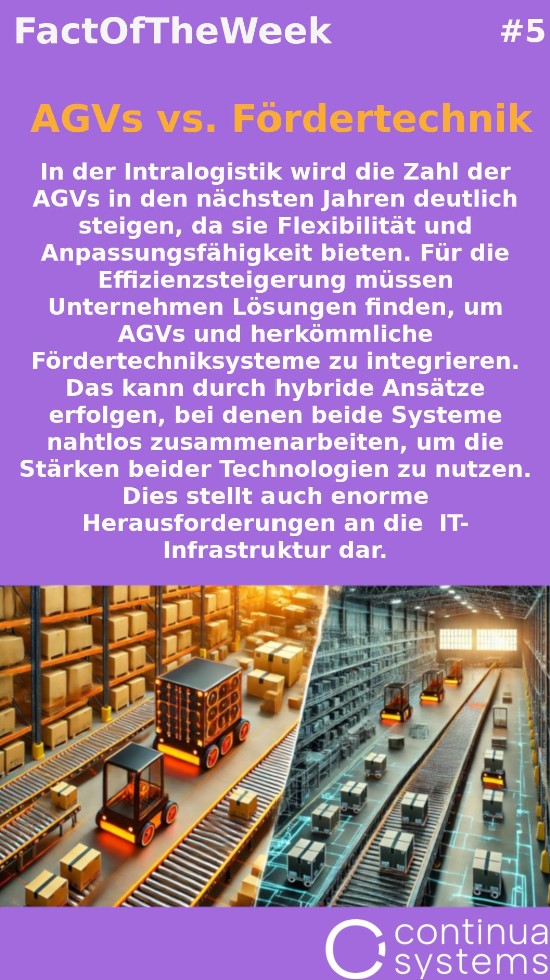
In intralogistics, the number of AGVs will increase significantly over the next few years, as they offer flexibility and adaptability. To increase efficiency, companies need to find solutions to integrate AGVs and conventional conveyor systems. This can be done through hybrid approaches where both systems work seamlessly together to utilize the strengths of both technologies. This also poses enormous challenges for the IT infrastructure.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7218992780218421248
#4 JIT vs. JIC
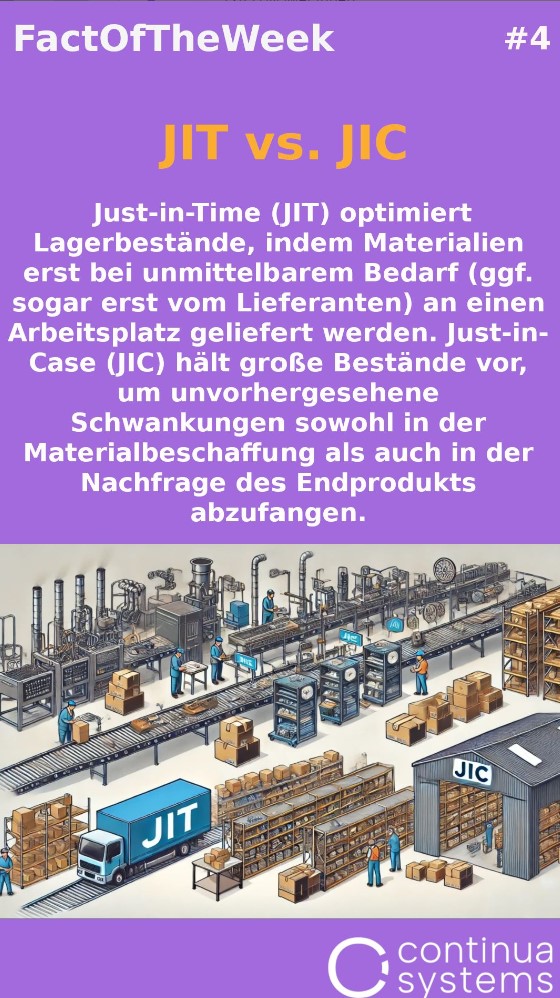
Just-in-Time (JIT) optimizes inventories by delivering materials to a workstation only when they are needed immediately (possibly even from the supplier). Just-in-Case (JIC) keeps large stocks in order to absorb unforeseen fluctuations in both material procurement and demand for the end product.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7216410849081475072
#3 Simulation vs. Emulation
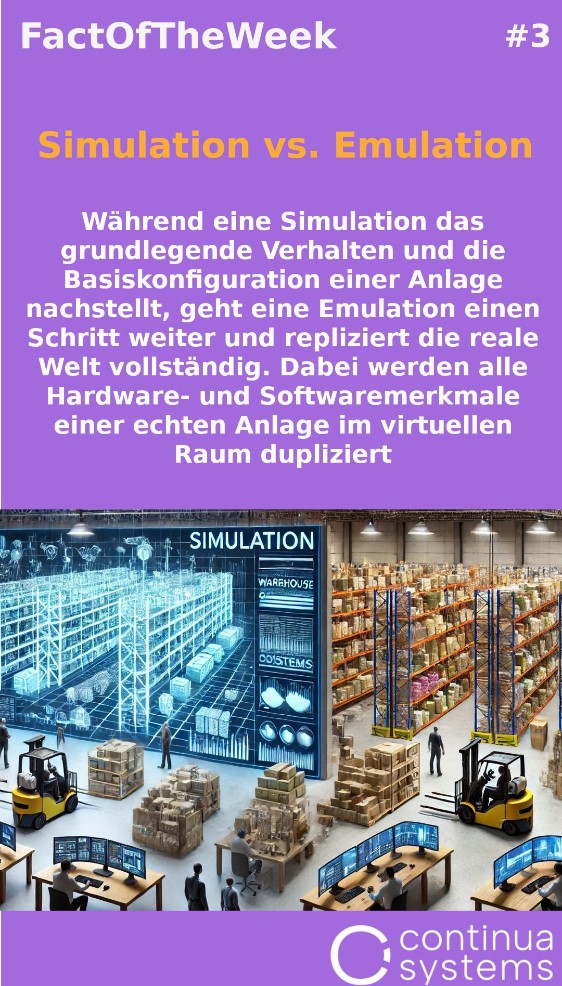
While a simulation recreates the basic behavior and configuration of a system, an emulation goes one step further and completely replicates the real world. All hardware and software features of a real system are duplicated in the virtual space.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7213828908545110018
#2 SIL
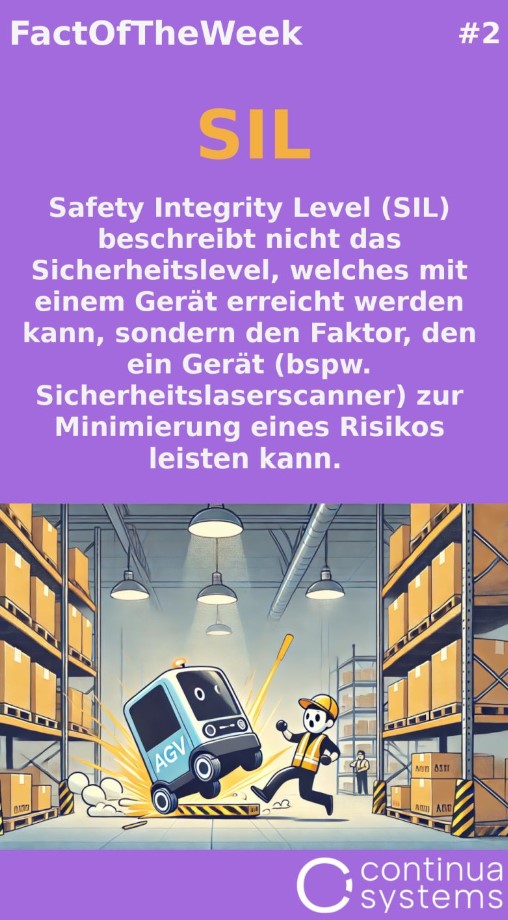
Safety Integrity Level (SIL) does not describe the safety level that can be achieved with a device, but the factor that a device (e.g. safety laser scanner) can achieve to minimize a risk.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:share:7210959352034164737/?actorCompanyId=91657960
#1. AMR vs. AGV
The control and sensor systems of autonomous mobile robots (AMR) are designed for tasks and navigation in unknown environments, while automated guided vehicles (AGVs) are highly optimized for known tasks in familiar environments.
LinkedIn: https://www.linkedin.com/feed/update/urn:li:share:7208539256879800320/?actorCompanyId=91657960