Wir haben uns etwas ganz Besonderes für Sie überlegt: Ab sofort teilen wir wöchentlich unseren FactoftheWeek auf unserer LinkedIn-Seite für Sie! Dabei handelt es sich um spannende und nützliche Fakten aus dem Bereich der Intralogistik, insbesondere für Fahrerlose Transportsysteme (FTS/AGVs), die Ihnen nicht nur einen interessanten Einblick in unsere tägliche Arbeit geben, sondern auch Ihr Wissen erweitern können.
Warum wir das machen? Ganz einfach: Wir möchten unser Know-how nicht nur für uns behalten, sondern es teilen!
Folgen Sie uns auf LinkedIn (https://www.linkedin.com/company/continua-systems-gmbh), um keinen FactoftheWeek zu verpassen! Seien Sie gespannt auf interessante Facts und lassen Sie uns gemeinsam Ihr Wissen erweitern.
#44 Blockchain
Blockchain ist eine dezentrale, digitale Datenbank, die Daten in verketteten Blöcken speichert. Jeder Block enthält Transaktionsdaten und einen Hash des vorherigen Blocks, wodurch Manipulationen erschwert werden. Da sie von einem Netzwerk verwaltet wird, gibt es keine zentrale Kontrolle. Dies macht sie sicher, transparent und fälschungssicher. Sie wird unter anderem für Kryptowährungen und digitale Verträge genutzt.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#43 Cobots
Cobots (kollaborative Roboter) arbeiten direkt mit Menschen zusammen und übernehmen monotone oder körperlich belastende Aufgaben wie Kommissionierung und Palettierung. Dank Sensoren und KI passen sie sich flexibel an ihre Umgebung an und sorgen für mehr Effizienz sowie eine ergonomischere Arbeitsweise im Lager.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#42 Digitale Zwillinge: Simulation von Logistikprozessen
Digitaler Zwilling ist ein virtuelles Abbild eines physischen Lagers oder Produktionssystems, das Echtzeitdaten nutzt, um Prozesse zu simulieren, zu optimieren und mögliche Engpässe vorherzusagen. Durch die Verbindung mit IoT-Sensoren und KI-gestützter Analyse lassen sich Betriebskosten senken, Ausfälle vermeiden & Strategien zur Effizienzsteigerung entwickeln. Unternehmen können so verschiedene Szenarien testen, bevor sie physische Veränderungen vornehmen – ein echter Gamechanger für die Intralogistik.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#41 Edge Computing
Edge Computing bezeichnet die dezentrale Datenverarbeitung direkt an der Quelle (z. B. Sensoren, Geräte) statt in zentralen Rechenzentren. Dadurch werden Latenzzeiten minimiert, Bandbreite gespart und Echtzeitanwendungen ermöglicht. Typische Einsatzbereiche sind autonomes Fahren, Smart Cities, industrielle IoT-Systeme und Telemedizin.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#40 SLAM – Intelligente Navigation für autonome Fahrzeuge
SLAM (Simultaneous Localization and Mapping) ermöglicht AGVs, ihre Umgebung in Echtzeit zu kartieren und sich ohne feste Infrastruktur darin zu orientieren. Durch Sensorfusion aus Kameras und Lidar passen sie ihre Routen dynamisch an Hindernisse an, was eine flexible und effiziente Navigation in Lagerhäusern ermöglicht.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#39 Micro-Fulfillment-Center – Die Zukunft des E-Commerce?
Kleine, hochautomatisierte Lager in Innenstädten ermöglichen eine extrem schnelle Same-Day- oder sogar One-Hour-Delivery. Durch den Einsatz von Robotik, KI-gestützter Bestandsverwaltung & optimierter Kommissionierung reduzieren sie Lieferzeiten und entlasten große Logistikzentren. Eine echte Lösung für den wachsenden Online-Handel.
LinkedIN:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#38 Low-Code & No-Code
No Code ist ein Ansatz, der es ermöglicht, Softwareanwendungen vollständig ohne Programmierung zu erstellen – meist über visuelle, drag-and-drop-basierte Schnittstellen. Low Code kombiniert diese visuellen Tools mit der Möglichkeit, bei Bedarf ein wenig Code zu ergänzen, um spezifische Anpassungen vorzunehmen. Beide Methoden zielen darauf ab, die Entwicklung zu beschleunigen und auch Nicht-Programmierern den Zugang zur Softwareentwicklung zu erleichtern.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#37 TOF Kamera

Eine Time-of-Flight (TOF)-Kamera ist eine spezielle Art von Kamera, die die Laufzeit von Licht misst, um die Entfernung zu einem Objekt bestimmen. Dies geschieht durch das Aussenden von Lichtimpulsen (meist Infrarotlicht) und die Messung der Zeit, die das Licht benötigt, um von einem Objekt reflektiert zu werden und zur Kamera zurückzukehren. Die gemessene Zeit wird verwendet, um die Entfernung zu berechnen. TOF-Kameras finden mehr und mehr Einzug in die mobile Robotik um bspw. Hindernisse zu erkennen.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#36 LLM (Large Language Model)
Ein LLM ist eine Art von KI-Modell, das auf der Verarbeitung natürlicher Sprache (Natural Language Processing, NLP) spezialisiert ist. Es handelt sich um ein tiefes neuronales Netzwerk, das mit einer großen Menge an Textdaten trainiert wurde, um Texte zu verstehen und zu generieren. Der bekannteste Vertreter ist wohl GPT (ChatGPT) von OpenAI.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#35 Pick by Light
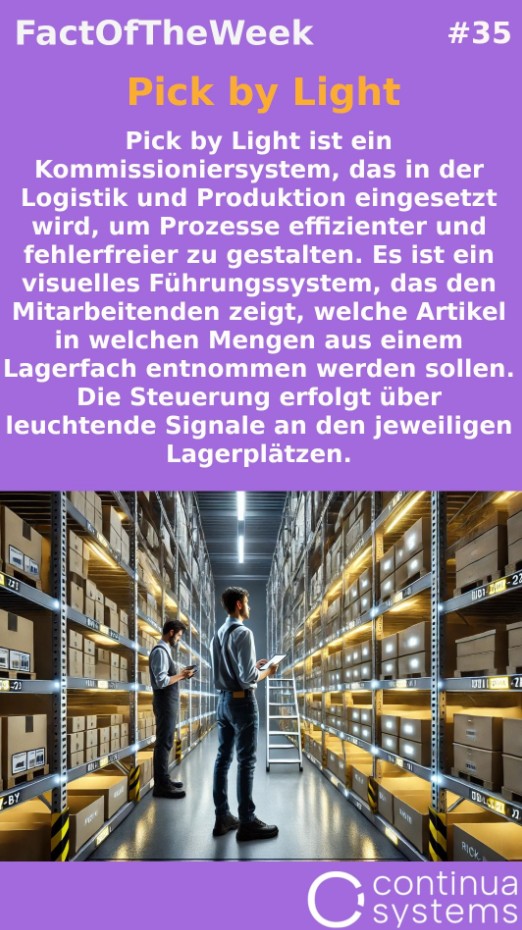
Pick by Light ist ein Kommissioniersystem, das in der Logistik und Produktion eingesetzt wird, um Prozesse effizienter und fehlerfreier zu gestalten. Es ist ein visuelles Führungssystem, das den Mitarbeitenden zeigt, welche Artikel in welchen Mengen aus einem Lagerfach entnommen werden sollen. Die Steuerung erfolgt über leuchtende Signale an den jeweiligen Lagerplätzen
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#34 Schutzfeld
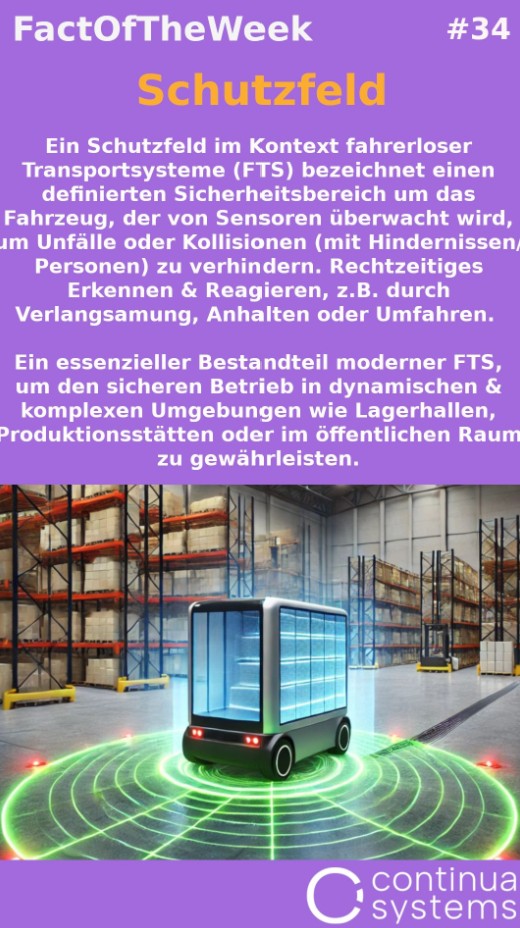
Ein Schutzfeld im Kontext fahrerloser Transportsysteme (FTS) bezeichnet einen definierten Sicherheitsbereich um das Fahrzeug, der von Sensoren überwacht wird, um Unfälle oder Kollisionen zu verhindern. Es dient dazu, Hindernisse oder Personen in der Nähe des Fahrzeugs rechtzeitig zu erkennen und darauf zu reagieren, z.B. durch Verlangsamung, Anhalten oder Umfahren des Hindernisses. Sie sind ein essenzieller Bestandteil moderner FTS, um den sicheren Betrieb in dynamischen und komplexen Umgebungen wie Lagerhallen, Produktionsstätten oder im öffentlichen Raum zu gewährleisten.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#33 Mecanum Rad
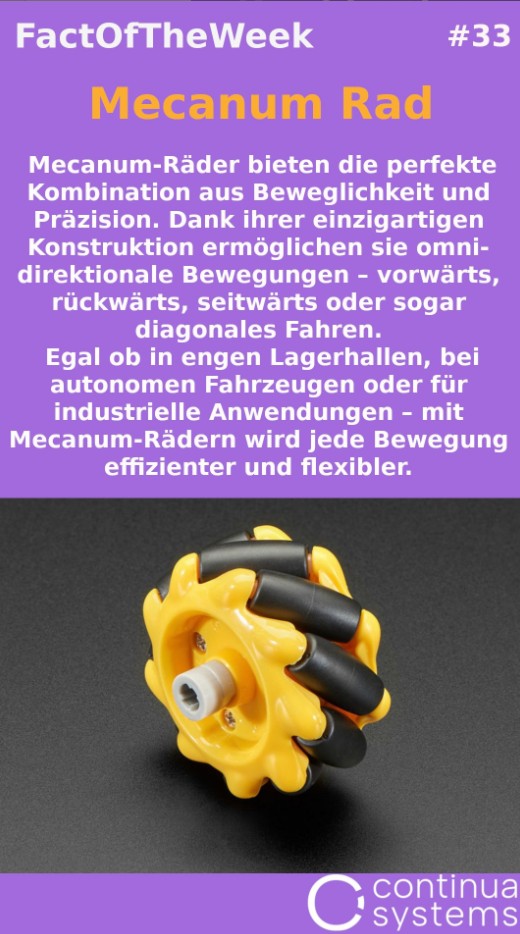
In der Welt der Intralogistik und mobilen Robotik sind innovative Lösungen der Schlüssel zum Erfolg. Mecanum-Räder bieten die perfekte Kombination aus Beweglichkeit und Präzision. Dank ihrer einzigartigen Konstruktion ermöglichen sie omni-direktionale Bewegungen – vorwärts, rückwärts, seitwärts oder sogar diagonales Fahren ist ein Kinderspiel!
Egal ob in engen Lagerhallen, bei autonomen Fahrzeugen oder für industrielle Anwendungen – mit Mecanum-Rädern wird jede Bewegung effizienter und flexibler.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#32 Rest API
REST-APIs sind der am häufigsten verwendete Standard für Web-APIs, da sie auf dem bewährten HTTP-Protokoll basieren und mit Formaten wie JSON und XML eine einfache Integration zwischen verschiedenen Systemen ermöglichen.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#31 Opportunity Charging

AGVs nutzen Opportunity Charging, um ihre Batterien während kurzer Pausen aufzuladen, wobei Soft- und Hard-Margin-Grenzen berücksichtigt werden.
Diese Methode maximiert die Betriebszeit und reduziert die Notwendigkeit für lange Ladezyklen.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#30 Scrum
Scrum ist ein agiles Framework zur Entwicklung von Produkten, besonders in der Softwareentwicklung. Es basiert auf iterativer Arbeit in kurzen Zyklen (Sprints), meist 1–4 Wochen, und fördert Teamarbeit, Transparenz und Anpassungsfähigkeit. Die Hauptrollen sind Product Owner (vertritt die Anforderungen), Scrum Master (unterstützt den Prozess) und das Entwicklungsteam. Scrum nutzt regelmäßige Meetings wie Daily Stand-ups, Sprint Reviews und Retrospektiven, um Fortschritt zu überprüfen und zu verbessern. Ziel ist es, schnell auf Veränderungen zu reagieren und kontinuierlich wertvolle Ergebnisse zu liefern.
#29 Ethercat
Ethercat – Ethernet – Canbus alles das gleiche?
Die Industrie setzt EtherCAT ein, weil es gegenüber herkömmlichen Ethernet-Verbindungen speziell auf die hohen Anforderungen industrieller Automations- und Steuerungsaufgaben zugeschnitten ist. In vielen Produktionsumgebungen oder Fertigungsanlagen müssen Sensoren, Aktoren, Antriebe und Regler extrem zuverlässig, schnell und deterministisch miteinander kommunizieren. Folgende Gründe verdeutlichen, warum EtherCAT hier besonders wichtig ist:
- Echtzeitfähige Kommunikation
- Deterministische Datenverarbeitung
- Hohe Synchronisationsgenauigkeit
- Skalierbarkeit und einfache Topologie
- Zuverlässigkeit und Diagnosen auf Bit-Ebene
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#28 Kommandozeile
Kommandozeile ist eine Benutzeroberfläche. Ermöglicht Computerbefehle in Textform einzugeben und auszuführen. Sie wird auch als Befehlszeilenschnittstelle bezeichnet. Sie unterscheidet sich von grafischen Benutzeroberflächen (GUIs) dadurch, dass sie rein textbasiert ist. In der Softwareentwicklung sind sie nicht wegzudenken, da sie eine leistungsfähige Schnittstelle für Entwickler bieten, um Aufgaben effizient zu erledigen, Prozesse zu automatisieren und tiefergehende Kontrolle über Entwicklungs- und Betriebssysteme zu erhalten.
Fun Fact: Sie wird oft mit Hackern assoziiert. Das hat historische, kulturelle und praktische Gründe. Diese Assoziation ergibt sich aus der Art und Weise, wie die Kommandozeile als mächtiges Werkzeug verwendet werden kann, und wie sie oft in der Popkultur dargestellt wird. Filme und Serien wie Matrix oder Mr. Robot zeigen Hacker oft, wie sie in dunklen Räumen sitzen und auf Bildschirmen mit grünem Text Befehle eingeben. Solche Darstellungen prägen die öffentliche Wahrnehmung von Hackern und verknüpfen sie mit der Kommandozeile.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#27 Warehouse Management System
Warehouse Management System (WMS) ist eine Softwarelösung, die zur effizienten Verwaltung, Steuerung und Optimierung von Lager- und Logistikprozessen eingesetzt wird. Es dient dazu, den gesamten Material- und Informationsfluss innerhalb eines Lagers zu organisieren und zu koordinieren. Ein WMS bietet Funktionen zur Überwachung und Optimierung von Lagerbewegungen sowie zur Verwaltung von Lagerbeständen. Ein modernes WMS ist oft modular aufgebaut und kann mit Technologien wie mobilen Endgeräten, IoT-Systemen und Automatisierungstechnik kombiniert werden, um Lagerprozesse zu automatisieren und zu optimieren.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#26 Differenzialantrieb vs. Omnidirektionaler Antrieb
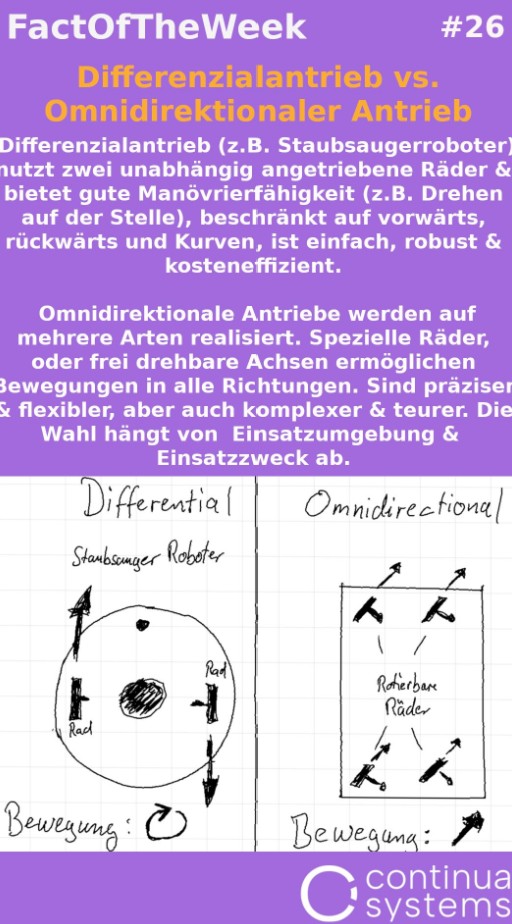
Der Differenzialantrieb (z.B. Staubsaugerroboter) nutzt zwei unabhängig angetriebene Räder und bietet gute Manövrierfähigkeit (z. B. Drehen auf der Stelle), ist jedoch auf vorwärts, rückwärts und Kurven beschränkt. Er ist einfach, robust und kosteneffizient. Omnidirektionale Antriebe können auf mehrere Arten realisiert werden. Mit speziellen Rädern (z. B. Mecanum) oder frei drehbaren Achsen (Swerve Drive) ermöglichen Bewegungen in alle Richtungen, sind präziser und flexibler, aber auch komplexer und teurer. Die Wahl hängt von der Einsatzumgebung und dem Einsatzzweck ab.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#25 VDMA LIF Format

Das VDMA LIF Format ergänzt die VDA 5050 mit dem „Layout Interchange Format“, um einheitlich Kurslayouts zwischen mobilen Robotern und Leitsteuerungen auszutauschen.
#24 Kinematisches Modell
Das kinematische Modell bei Fahrerlosen Transportsystemen (FTS/AGV) beschreibt, wie sich das Fahrzeug im Raum bewegt. Es zeigt, wie Steuer- und Antriebsbefehle (wie Lenkung und Geschwindigkeit) die Position und Richtung des Fahrzeugs beeinflussen. Damit lässt sich berechnen, wie das Fahrzeug gesteuert werden muss, um gezielt zu einem bestimmten Punkt zu fahren, ohne dabei auf komplexe physikalische Faktoren wie Gewicht oder Reibung einzugehen. Dieses mathematische Modell hilft, die Bewegung des FTS einfach und präzise zu planen. Ein klassisches Beispiel für ein kinematisches Modell ist der Differenzialantrieb. Beim Differenzialantrieb hat das Fahrzeug zwei unabhängig angetriebene Räder auf einer gemeinsamen Achse (wie bei einem Staubsaugerroboter). Durch die Drehgeschwindigkeit der beiden Räder lässt sich die Fahrtrichtung und Geschwindigkeit im Modell berechnen und in der Realität steuern.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#23 Testing Server & Staging Server
Ein wesentlicher Bestandteil guter Software ist das Testen von Software. Testing- und Staging-Server dienen unterschiedlichen Zwecken innerhalb des Entwicklungsprozesses, jedoch mit dem gemeinsamen Ziel, Software vor Produktionsstart zu testen. Testing Server werden in der frühen Phase des Entwicklungsprozesses genutzt. Neue Funktionen und Änderungen werden hier meist isoliert getestet, um sicherzustellen, dass sie wie geplant funktionieren. Sie sind weniger realitätsnah konfiguriert und können zusätzliche Tools für das Aufdecken von Fehlern beinhalten. Auch die Testdaten sind oft generiert, um Extreme zu testen und Probleme in einem kontrollierten Rahmen zu entdecken.
Staging Server simulieren im Gegensatz eine Produktionsumgebung so genau wie möglich. Diese Stufe (Stage) ist die Vorstufe vor Veröffentlichung der Software in der Produktion, sozusagen die letzte Freigabe. Ziel ist es sicherzustellen, dass sich die Software unter realitätsnahen Bedingungen (Setup, Konfiguration, angeschlossene Systeme, …), mit realitätsnahen Testdaten wie geplant funktioniert.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#22 Prozessautomatisierung – Datenerhaltung
Bei der Prozessautomatisierung fallen jede Menge Daten an. Manche Daten aus vorherigen manuellen Prozessen werden weniger, weil sie nun nicht mehr „human readable“ (Menschenlesbarkeit), sondern „machine readable“ (Maschinenlesbarkeit) gespeichert werden, was den Aufwand/Speicher für die Darstellung und Lesbarkeit für den Menschen reduziert. Die Überführung von Daten in Prozesse bzw. die gemeinsame Nutzung der Daten von verschiedensten Systemen aber kann wiederum viele zusätzliche Daten erzeugen. Hier ist Effizienz gefragt.
Effiziente Datenspeicherung erfordert ein Speichermodell, das Daten ohne Dopplungen in der Persistenzschicht strukturiert. Durch den Verzicht auf redundante Einträge werden Speicherplätze gespart und Zugriffszeiten optimiert. Eine saubere, doppelfreie Datenstruktur verbessert zudem die Wartbarkeit und Skalierbarkeit der Systeme – entscheidend für langfristige Performance und Ressourcenmanagement.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#21 Prozessautomatisierung
Prozessautomatisierung ist die Transformation von digitalen sowie bisher manuell ausgeführten Prozessen in automatisierte Prozesse.
Sie ist entscheidend, um Effizienz und Präzision in der Produktion ohne Redundanz (von zum Beispiel weiteren Fertigungsmaschinen) zu maximieren. Eine optimierte Software stellt sicher, dass jedes Teil in einer optimierten Reihenfolge an eine Verarbeitungsstation (z.B. Maschine) gelangt, unnötige Wiederholungen vermieden werden und der Workflow klar strukturiert ist. So wird der Durchsatz erhöht, Maschinenauslastung maximiert und Ressourcen geschont. Weiterhin gibt es Möglichkeiten manuelle Teilschritte, die sich nicht automatisieren lassen, digital zu unterstützen, sodass Prozesssicherheit gewährt ist und menschliche Fehler reduziert werden.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#20 Bodennavigation vs. Bewegungsverfolgung
AGVs mit freier Navigation nutzen verschiedene Methoden wie Bodennavigation oder Bewegungsverfolgung, die sich in ihrer Funktion und Anwendung unterscheiden:
Bodennavigation basiert auf Markierungen oder speziellen Merkmalen am Boden, wie Magnetstreifen, QR-Codes oder optischen Linien. Diese geben AGVs vor, wo es sich befindet und wohin es sich bewegen soll. Die Methode liegt in ihrer Präzision und Einfachheit, allerdings ist sie weniger flexibel, da Markierungen festgelegt sind und Änderungen der Umgebung aufwändige Anpassungen erfordern.
Bewegungsverfolgung setzt auf Sensoren wie Kameras, Lidar oder Inertialsysteme, um die Bewegung des AGVs in Echtzeit zu verfolgen. Das ermöglicht eine dynamische und flexible Navigation, da der Roboter seine Umgebung ständig scannt und Routen anpassen kann, ohne auf feste Markierungen angewiesen zu sein. Bewegungsverfolgung bietet eine höhere Flexibilität, jedoch kann sie anspruchsvoller in der Implementierung und wartungsintensiver sein.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#19 Logging vs, Monitoring
Logging bezieht sich auf das Protokollieren von Fehlern und Änderungen in Anwendungen. Es dient dazu, Ereignisse im System aufzuzeichnen, um z.B. Leistungsprobleme zu identifizieren. Logdaten unterstützen bei der Fehlerbehebung und sind für Prüfungs-, Compliance-Zwecke und Trendanalysen nützlich. Eine durchdachte Logging-Strategie vermeidet unnötige Daten, um Ressourcen zu schonen und liefert sowohl maschinenlesbare als auch administrativ relevante Informationen.
Monitoring (APM) überwacht die Anwendungsleistung, indem es Metriken wie Verfügbarkeit, Reaktionszeit, Speichernutzung und CPU-Verbrauch erfasst. Es hilft IT-Teams, Betriebsanomalien zu erkennen und sollte in allen Systemen eingesetzt werden, insbesondere bei Anlagen
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#18 Distanzberechnung in PostgreSQL
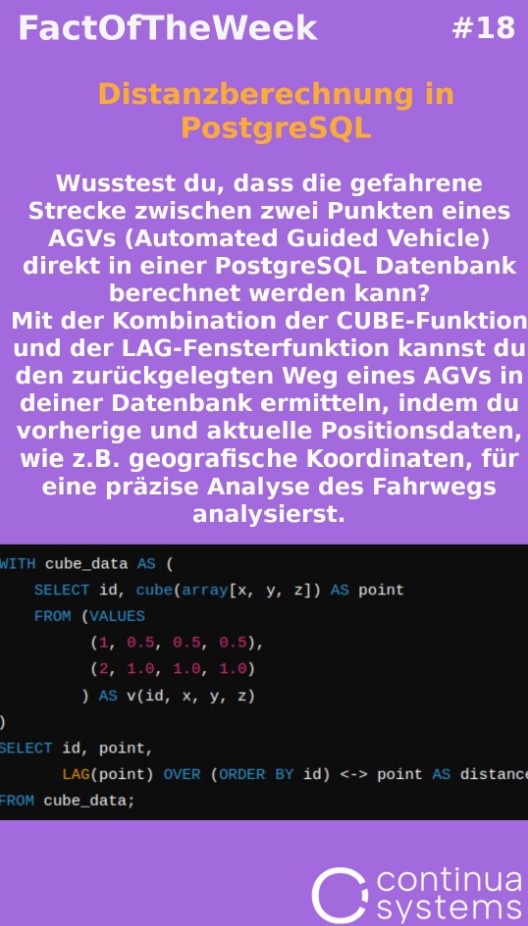
Wusstest du, dass die gefahrene Strecke zwischen zwei Punkten eines AGVs (Automated Guided Vehicle) direkt in einer PostgreSQL Datenbank berechnet werden kann?
Mit der Kombination der CUBE-Funktion und der LAG-Fensterfunktion kannst du den zurückgelegten Weg eines AGVs in deiner Datenbank ermitteln, indem du vorherige und aktuelle Positionsdaten, wie z.B. geografische Koordinaten, für eine präzise Analyse des Fahrwegs analysierst.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#17 VDA5050
VDA 5050 beschreibt, wie ein AGV seinen aktuellen Zustand, wie Position, Geschwindigkeit oder Batteriestand, an das Leitsystem kommuniziert. Zudem legt der Standard fest, wie das AGV Aufträge erhält, diese verarbeitet und Statusinformationen zurücksendet.
Solche Standards sind wichtig, weil sie eine einheitliche Kommunikation zwischen AGVs und Steuerungssystemen unterschiedlicher Hersteller ermöglichen und damit die Interoperabilität und Weiterentwicklung in der Automatisierung fördern.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#16 LiDAR
LiDAR ist eine Technologie, die Laserstrahlen nutzt, um in Echtzeit präzise Entfernungen und Bewegungen in einer Umgebung zu messen und daraus detaillierte 3D-Karten zu erstellen.
Sie wird bei autonomen Fahrzeugen und AGVs zur Lokalisierung, Navigation und Hinderniserkennung verwendet, um die Umgebung zu „erkennen“ und sicher zu navigieren.
History Fact: LiDAR-Technologie wurde in den 1960er Jahren erstmals für atmosphärische Studien und zur Kartierung des Mondes während der NASA-Apollo-Missionen eingesetzt!
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#15 Just-in-Sequence
Mehr als nur pünktliche Lieferung (Just-in-time)! Es geht darum, nicht nur die richtige Menge zur richtigen Zeit zu liefern, sondern auch sicherzustellen, dass die Reihenfolge der ProduPostedkte so stimmt, dass sie direkt verarbeitet werden können. Das bedeutet, dass Zulieferer bereits bei der Verpackung und Anlieferung darauf achten müssen, dass alles in der exakt benötigten Reihenfolge ankommt.
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#14 IDE
Eine IDE (Integrated Development Environment, auf Deutsch: Integrierte Entwicklungsumgebung) ist eine Softwareanwendung, die Softwareentwicklern hilft, effizienter Code zu schreiben, zu testen und zu debuggen. Eine IDE integriert verschiedene Tools und Funktionen, die typischerweise im Entwicklungsprozess benötigt werden, in einer einzigen Benutzeroberfläche. Bekannte Vertreter sind bspw. Visual Studio bzw. Visual Studio Code, Eclipse, JetBrains Rider, Xcode
LinkedIn:
https://www.linkedin.com/company/91657960/admin/page-posts/published
#13 SQL
SQL (Structured Query Language, auf Deutsch: Strukturierte Abfrage Sprache) ist eine standardisierte Programmiersprache, die zur Verwaltung und Manipulation von Daten in relationalen Datenbanken verwendet wird. Mit SQL können Nutzer Datenbanken erstellen, Daten abrufen, einfügen, aktualisieren und löschen. SQL ist in der Datenbankwelt weit verbreitet, da es eine effiziente und flexible Möglichkeit bietet, große Datenmengen zu verwalten und auszuwerten. Es ermöglicht auch die Definition von Beziehungen zwischen verschiedenen Datentabellen und bietet Werkzeuge zur Analyse und Berichterstattung
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7239275186091417601/?actorCompanyId=91657960
#12 Hard(ware)-SPS vs. Soft(ware)-SPS
SPS (Speicherprogrammierbare Steuerung) sind ein elementarer Bestandteil in der Automatisierungstechnik. Man unterscheidet zwischen klassischen Hard-SPS und Soft-SPS. Eine Hard-SPS ist eine spezielle Hardware-Komponente, die für die Steuerung industrieller Prozesse entwickelt wurde. Sie enthält alle notwendigen Komponenten wie Prozessor, Speicher, Eingangs-/Ausgangs-Module und Kommunikationsschnittstellen in einem robusten Gehäuse. Eine Soft-PLC ist eine Softwarelösung, die auf Standard-PC-Hardware oder eingebetteten Systemen ausgeführt wird. Sie emuliert die Funktionen einer klassischen Hard-PLC. Die Wahl zwischen Hard-PLC und Soft-PLC hängt von den spezifischen Anforderungen der Anwendung ab, wie z.B. der benötigten Zuverlässigkeit, Flexibilität, Kosten und Umgebungsbedingungen.
LinkedIn:
#11 Lokalisierung
Lokalisierung beschreibt Verfahren, die eine möglichst genaue Näherung über die Position von AGVs gibt. Hierbei wird in relative und absolute Lokalisierung unterschieden. Während relative Lokalisierungslösungen einen vorgegebenen Startpunkt benötigen und die folgenden Positionen anhand von Deltas in Sensordaten nähert, sind Ansätze zur absoluten Lokalisierung in der Lage ohne Kenntnis des Startpunkts die Position des AGVs anhand von externen (globalen) Referenzen zu schätzen.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7234190423441723392
#10 Framework vs. Library
Ein Framework ist eine Vorlage, die Struktur und Ablauf eines Programms beschreibt, der Entwickler schreibt sein Programm anhand dieser Vorlage. Eine Library abstrahiert komplexe Funktionen bzw. bietet (Standard-)Funktionen, die der Entwickler nach Bedarf einfach in sein Programm einbinden und verwenden kann
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7231646231091904512
#9 Encapsulation vs. Abstraction
Kapselung ist das Konzept, bei dem Daten und Methoden, die auf diese Daten zugreifen, in einer einzigen Einheit oder Klasse gebündelt werden, um den direkten Zugriff auf bestimmte Komponenten des Objekts zu beschränken und die Integrität der Daten zu schützen. Abstraktion hingegen bezieht sich darauf, die komplexen Implementierungsdetails eines Systems zu verbergen und nur die wesentlichen Merkmale offenzulegen, sodass der Benutzer auf einer höheren Ebene mit dem System interagieren kann, ohne die zugrunde liegende Komplexität verstehen zu müssen.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7229116993231024128
#8 Navigation
Navigation beschreibt das Verfahren, wie ein AGV den ihm vorgegebenen Pfad abfährt. Diesen Pfad (oft auch Trajektorie) generiert das AGV entweder selbst oder kommt als Vorgabe von einer übergeordneten Leitsteuerung. Dabei spielt die Kenntnis der aktuellen Position, sowie eine Projektion zukünftiger Positionen anhand des Bewegungsmodells (Kinematik) des AGVs eine entscheidende Rolle.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7226572772141891584
#7 Unit Test vs. Integration Test
Unit Tests überprüfen einzelne Komponenten oder Softwareteile isoliert. Integration Tests überprüfen das Zusammenspiel mehrerer Komponenten/Softwareteile zusammen.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7224005834446426112
#6 Zentrale vs. dezentrales AGV Flottenmanagement
AGVs mit zentralisierter Steuerung werden von einem zentralen System koordiniert, das eine Flotte von AGVs überwacht, steuert und eine Schnittstelle für Aufträge aus überlagerten Warenwirtschaftssystemen (WaWi) bietet. Zudem werden oft umfassende Bedienoberflächen zur Verfügung gestellt. AGVs mit dezentraler Steuerung arbeiten weitestgehend autonom und kommunizieren direkt miteinander, um ihre Aufträge zu koordinieren. In diesem Szenario können Aufträge von überlagerten WaWi-Systemen auf verschiedene Arten bereitgestellt werden. In der Regel gibt es keine zentrale Bedienoberfläche zur Verwaltung der AGV Flotte.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7221528717108379648
#5 AGVs vs. Fördertechnik
In der Intralogistik wird die Zahl der AGVs in den nächsten Jahren deutlich steigen, da sie Flexibilität und Anpassungsfähigkeit bieten. Für die Effizienssteigerung müssen Unternehmen Lösungen finden, um AGVs und herkömmliche Fördertechniksysteme zu integrieren. Das kann durch hybride Ansätze erfolgen, bei denen beide Systeme nahtlos zusammenarbeiten, um die Stärken beider Technologien zu nutzen. Dies stellt auch enorme Herausforderungen an die IT-Infrastuktur dar.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7218992780218421248
#4 JIT vs. JIC
Just-in-Time (JIT) optimiert Lagerbestände, indem Materialien erst bei unmittelbarem Bedarf (ggf. sogar erst vom Lieferanten) an einen Arbeitsplatz geliefert werden. Just-in-Case (JIC) hält große Bestände vor, um unvorhergesehene Schwankungen sowohl in der Materialbeschaffung als auch in der Nachfrage des Endproduktes abzufangen.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7216410849081475072
#3 Simulation vs. Emulation
Während eine Simulation das grundlegende Verhalten und die Basiskonfiguration einer Anlage nachstellt, geht eine Emulation einen Schritt weiter und repliziert die reale Welt vollständig. Dabei werden alle Hardware- und Softwaremerkmale einer echten Anlage im virtuellen Raum dupliziert.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:activity:7213828908545110018
#2 SIL
Safety Integrity Level (SIL) beschreibt nicht das Sicherheitslevel, welches mit einem Gerät erreicht werden kann, sondern den Faktor, den ein Gerät (bspw. Sicherheitslaserscanner) zur Minimierung eines Risikos leisten kann.
LinkedIn:
https://www.linkedin.com/feed/update/urn:li:share:7210959352034164737/?actorCompanyId=91657960
#1. AMR vs. AGV
Die Steuerung und Sensorik von autonomen Mobilen Robotern (AMR) sind für Aufgaben und Navigation in unbekannten Umgebungen, während fahrerlose Transportfahrzeuge (FTF/AGV) hoch optimiert für bekannte Aufgaben in vertrauter Umgebung ausgelegt sind.
LinkedIn: https://www.linkedin.com/feed/update/urn:li:share:7208539256879800320/?actorCompanyId=91657960